1、视频图像偏移定位:
机器人通过自身的各种传感器探测周围环境,利用感知到的局部环境信息进行局部的地图构造,并与其内部事先存储的完整地图进行匹配。通过匹配关系获得自己在全局环境中的位置,从而确定自身的位置。该方法由于有严格的条件限制,只适于一些结构相对简单的环境。基于视觉的定位主要分为单目视觉、双目视觉。
单目视觉无法直接得到目标的三维信息,只能通过移动获得环境中特征点的深度信息,适用于工作任务比较简单且深度信息要求不高的情况,如果利用目标物体的几何形状模型,在目标上取3个以上的特征点也能够获取目标的位置等信息,但定位精度不高。
双目立体视觉三维测量是基于视差原理的,即左相机像面上的任意一点只要能在右相机像面,上找到对应的匹配点,就可以确定出该点的三维信息,从而获取其对应点的三维坐标。

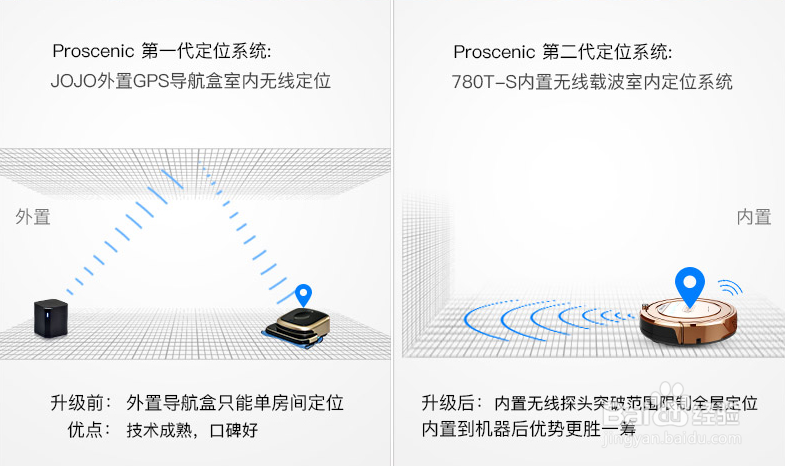
2、室内无线载波定位:
三点式导航是根据测量得到的机器人与信标的距离来确定移动机器人位置的方法。三边测量定位系统至少需要3个已知位置的发射器(或接收器),而接收器(或发射器)安装在移动机器人上。三角测量和三边测量的思路大体一致,通过测量移动机器人与信标之间的角度来进行定位。
3、360度旋转激光定位:
是用在航海或航空中利用无线电基站发出的无线电波实现定位与导航的技术。对机器人室内定位而言是指,机器人通过各种传感器接收或观测环境中已知位置的信标,经过计算得出机器人与信标的相对位置,再代入已知的信标位置坐标,解出机器人的绝对坐标来实现定位;

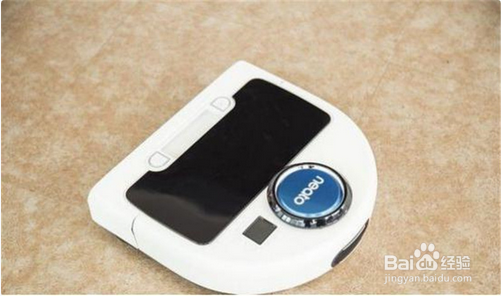
1、下图中扫地机器人采用了图像偏移定位系统,是通过摄像头向上拍摄天花板图像位移的偏差变化定位坐标,所以它的线路规划比较合理,但是这种定位方式对天花板上有参照物的要求比较高,所以有时候会有一定的误差。这款扫地机器人暂时没有在国内销售,在国内市场销售的基本上都是随机式扫地机。

2、下图中扫地机器人采用的则是无线载波室内定位系统+多点矩阵系统,这种定位方式对环境的要求比较低,所以在构建地图方面是十分精确的。利用高精密度的陀螺仪,能让扫地机器人在工作的时候少走“歪路”。

3、下图中扫地机器人采用的是激光定位系统,通过机器顶部旋转的激光头进行测距,是目前市场上分区规划效率最高的扫地机,但是由于激光探头一直旋转,所以会出现寿命较短的问题。
4、下图扫地机器人在前半部分的行进还比较有规律,但是由于定位系统不够完备,无法构建准确的地图,最后导致规划效果比较一般,甚至有些乱扫的痕迹。

5、而下图的扫地机器人表现出来的基本就是随机式扫地机器人的工作原理,不仅没有多少规划的痕迹,而且覆盖率很低,重复率非常高,防跌落能力和障碍物通过能力很差,连压门条都没能通过,最终也没有完成清扫。

6、各款扫地机器人清扫视频合集:
